植苗机器人
设计者:李继魁 (机械设计专业2014级)
团队成员:宋德江、庞宝玉、刘海亮、赵永吉、黄金聪
指导教师:谢小正、刘小刚
植苗机器人以车架为载体,以ZigBee模块为核心,通过单片机与继电器控制电机,带动相应机械结构,完成多种苗类作物的栽培。通过ZigBee转Wifi模块,使机器人接入互联网,可通过上位机(如PC机、平板或手机)进行远程控制和数据交换。工作过程可简单概括为挖,传,转,送。摆杆机构可调整种植角度,能够适应坡度种植。能够满足人们对于农业生产和环境绿化的需求,可在荒漠化地区种植抗旱树苗;进行苗类农作物的移栽;针对高尔夫球场的破损、坏死草坪进行草苗修补;及时更换足球场破损的草皮;对小区、公园等进行绿化等。
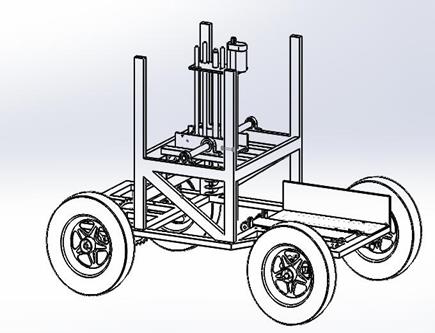
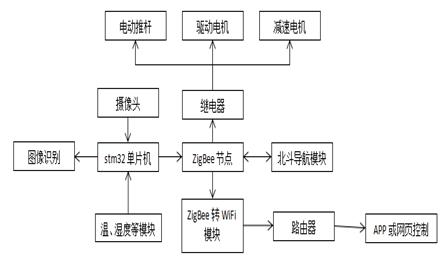
图 1 控制流程图 图2 植苗机器人三维图

图3 植苗机器人实物图

|
序号
|
成果名称
|
获奖级别
|
|
1
|
实用新型专利
|
专利权人:李继魁
专利号:201720025068.4
|
|
2
|
第三届“互联网+” 大学生创新创业大赛
|
省级银奖及校级特等奖
|
|
3
|
挑战杯”大学生课外学术科技作品竞赛
|
省级二等奖
|
 甘公网安备 62010302000692号
甘公网安备 62010302000692号