兰州理工大学第一届“大志杯”
大学生创意创新设计大赛及校内作品展(科技制作类)
智能汽车自动泊车、入库系统
作 者: 张仲玺 指导教师:戴宝林
简 介: 无人驾驶智能汽车是国内外公认的未来汽车的重要发展方向之一。汽车智能化存在多种定义,其中最普遍的定义是能像人类驾驶员一样处理由传感器得到的信息,根据这些信息对车辆规划出各种操控动作并加以执行。而自动泊车、入库是智能化所涵盖的各种车辆操控中最具挑战性的动作之一。大多数汽车用户需要比车身长出约1.8米的停车位,才能顺利完成顺列式驻车,在节约能源减少事故方面存在欠缺。
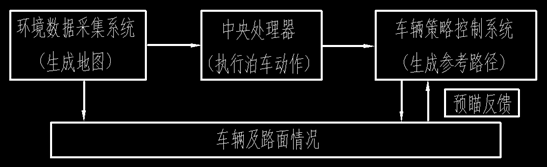
自动泊车和自动入库系统执行过程如图所示,包括:环境数据采集系统、中央处理器和车辆策略控制系统,所述的环境数据采集系统包括:图像采集系统和车载距离探测系统。可采集图像数据及周围物体距车身的距离数据,并通过数据线传输给中央处理器;所述的中央处理器可将采集到的数据分析处理后,得出汽车的当前位置、目标位置以及周围的环境参数,依据上述参数作出自动泊车、入库策略,并将其转换成电信号;所述的车辆策略控制系统接受电信号后,依据指令作出汽车的行驶角度、方向及动力支援方面的操控。该系统的工作原理是根据汽车的传感器感知、反馈信息,由电子控制机械转向系统和车载CPU监测计算停车位的空间并及时调整车身姿态,最终自动完成泊车工作。

 甘公网安备 62010302000692号
甘公网安备 62010302000692号